Abstract
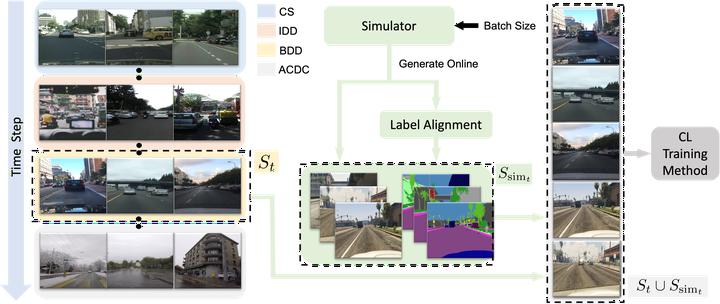
Continual Learning is a step towards lifelong intelligence where models continuously learn from recently collected data without forgetting previous knowledge. Existing continual learning approaches mostly focus on image classification in the class-incremental setup with clear task boundaries and unlimited computational budget. This work explores Online Domain-Incremental Continual Segmentation~(ODICS), a real-world problem that arises in many applications, \eg, autonomous driving. In ODICS, the model is continually presented with batches of densely labeled images from different domains; computation is limited and no information about the task boundaries is available. In autonomous driving, this may correspond to the realistic scenario of training a segmentation model over time on a sequence of cities. We analyze several existing continual learning methods and show that they do not perform well in this setting despite working well in class-incremental segmentation. We propose SimCS, a parameter-free method complementary to existing ones that leverages simulated data as a continual learning regularizer. Extensive experiments show consistent improvements over different types of continual learning methods that use regularizers and even replay.
Motasem Alfarra
Machine Learning Researcher at Qualcomm AI Research, Amsterdam, Netherlands
I am a research scientist at Qualcomm AI Research in Amsterdam, Netherlands. I obtained my Ph.D. in Electrical and Computer Engineering from KAUST in Saudi Arabia advised by Prof. Bernard Ghanem. I also obtained my M.Sc degree in Electrical Engineering from KAUST, and my undergraduate degree in Electrical Engineering from Kuwait University. I am interested in domain shifts, LLM safety, and how to combat them with test-time adaptation and continual learning. I helped co-organizing the first and second workshops on Test-Time Adaptation at CVPR2024 and ICML2025 and the ICLR2026 workshop on Monitoring ML Models Under Drift.